Unishark Universal Fatshark software for al modules ,
 | Unisharks Furious V1 Made for Furious v1 and v2 modules UniFuriousV1_softwarev1.1.hex (69.77KB) |
| Unishark Furious v3 Made for Furious v3 Modules < not confirmed > UniFuriousV3_NotConfirmed_softwarev1.1.hex (69.82KB) |
Made for Furious v3 Modules < not confirmed >
| UniFuriousV3_NotConfirmed_softwarev1.1.hex (69.82KB) |
| Unishark Realac / Laforge Firmare Made for LaForge and Realac modules UniRealac_softwarev1.1.hex (69.77KB) |
Made for LaForge and Realac modules
| UniRealac_softwarev1.1.hex (69.77KB) |
works like this ,, you have normal manual mode in normal boot ,,
if you are in manual you have just up and down channel when preshing up and down ,,
if you hold middle pos button preshed you wil see BAND +
if released there !
and you wil go one band up
if you hold it longer you wil see BAND -
if released there !
and you wil go one band down
and if you hold longer you wil see SFAVO
here you can store the channel you are on to a FAV band channel.
you have 8 to store for fast acces !
and if you hold it longer ,, !! You wil get a menu !! yeaa this wil include
Search mode = searching quad using a radar using 2 dots
Filter L M H = here you can set your histiric switching filter <higher number more filtering >
Scope = wil give a smal graph scope
below the pictures i wil post and update the lates Arduino Sketch 2 use
i also post Hex files compiled already for people not in 2 coding
if you are in to Arduino just Define your module and if using Furious one also
Define v1 or V3 version ,, for LaForge = Realac ,
enjoy !!

/////////////////////////////////////////////////////////////////////////////////////////////////
/* UniSHark software ,, made for Realac LaForge and Furious and Buzz Fly Module's !!
All in 1 Firmware
Buzz user have other options then Furious/Laforge/Realacc
whe keep inovating if there are errors i try 2 fix them real fast ,,
and now whe have a universal FIrmware ,
,lets Go !!
added Buzz Scope and Buzz Search quad option for Furious and Realac users
fixed some other things ,,
Buzz 27-3-2017
*/
#define Realac // Realac // Furious// Buzz // for Ubad = LaForge select Realac !
//#define v1 //v1//v3 define one if used for furious
#define osdoff // osd // osdoff for Minimosd mod !!
#define white // color // white // oled white or 2 color versions
////////////////////////////////////////////////////////////////////////////////////////////////
uint8_t NOBLACK = 10; // stil Beta Value !!
uint8_t HISFILT = 10; // setting set in menu
#define SIG_ALARM 20 // signal alarm treshold ,, between 0-50 // works onley on PIEZO enabled Modules ,,
#define screentime 100
/////////////////////////////////////////////////////////////////
#ifdef Furious
#ifdef v1
#define BUT1 10 //
#define BUT2 8 // Buttons pins !?!
#define BUT3 3 //
#endif
#ifdef v3
#define BUT1 10 //
#define BUT2 8 // Buttons pins !?!
#define BUT3 3 //
#define sp1 12 //
#define sp2 13 // Fatsharky pins !?!
#define sp3 14 //
#define OLEDSW 29//
#endif
#endif
#ifdef Realac
#define BUT1 2 //
#define BUT2 3 // Buttons pins !?!
#define BUT3 4 //
#endif
#ifdef Buzz
#define VOLT_PIN A3
#define RECV_PIN 2
#define DIV1_PIN 5
#define DIV2_PIN 6
#define OSD_PIN 8
#define Ircode1 0x17B4A228 // IR LOCK OFF
#define Ircode2 0x1AB4A6E1 // IR LOCK ON
#define Ircode3 0x967BB80C // CH UP
#define Ircode4 0x937BB355 // CH DOWN
#define Ircode5 0x940EAE71 // SCAN
#define Ircode6 0x970EB328 // Search RADAR
#define Ircode7 0x971BB598 // Scope
#define Ircode11 0x530DB67C
#define Ircode22 0x560DBB35
#define Ircode33 0xD1D4CC60
#define Ircode44 0xCED4C7A9
#define Ircode55 0x58B59A1D
#define Ircode66 0x5BB59ED4
#define Ircode77 0x5BC2A144
float rssi ;
#endif
/////////////////////////////////////////////////////////////////////////////////////////////////
float rssi2 ;
float rssi3 ;
float rssi1_MIN = 80;
float rssi1_MAX = 300; // Auto calib stuff
float rssi2_MIN = 80;
float rssi2_MAX = 300;
uint8_t goat = 0;
// DO Not TOuCH BelOw If not Knowing what you are doing !!
#include <Wire.h>
#include <Adafruit_GFX.h>
#include <Adafruit_SSD1306.h>
#define OLED_RESET 4
Adafruit_SSD1306 display(OLED_RESET);
#include <SPI.h>
#include <avr/pgmspace.h>
#ifdef Furious
#define spiDataPin A3
#define slaveSelectPin A2
#define spiClockPin A1
#define ledPin 13
#define DIV1_PIN 6
#define DIV2_PIN 5
#endif
#ifdef Realac
#define spiDataPin 10
#define slaveSelectPin 11
#define spiClockPin 12
#define ledPin 13
#define DIV1_PIN 14
#define DIV2_PIN 15
#define PIEZO 6
#endif
#ifdef Buzz
#define ledPin 13
#define spiDataPin 10
#define slaveSelectPin 11
#define spiClockPin 12
#include <IRremote.h>
IRrecv irrecv(RECV_PIN);
decode_results results;
uint16_t volt ;
#endif
#include <EEPROM.h>
uint8_t scan = 1;
uint8_t menu = 0;
uint8_t best = 0;
uint8_t memo = 0;
uint8_t selector = 4; // 4 means manual !!
uint16_t scr = 0;
uint8_t swt = 0;
uint16_t HIS1, HIS2;
uint8_t scp = 0;
//////////////////////////
uint16_t rssiosd1;
uint16_t rssiosd2;
#ifdef osd
uint8_t osdt;
#endif
uint8_t mnu = 0;
///////////////////////////// new favo part !
uint8_t fav1;
uint8_t fav2;
uint8_t fav3;
uint8_t fav4;
uint8_t fav5;
uint8_t fav6;
uint8_t fav7;
uint8_t fav8;
uint8_t favselect;
////////////////////////////////
bool buttonState0 = 1;
bool buttonState1 = 1;
bool buttonState2 = 1;
uint8_t but = 0;
uint8_t sub1 = 0;
uint16_t dp;
// Channels
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
uint8_t ch = 24; // here you set you starting channel ,, look below in the channelFreqTable list ch 24 = Immersion ch 1 , 1-8 = 24 - 31 and Race Band ch 32 - 39
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
const uint16_t channelTable[] PROGMEM = {
// Channel 1 - 8
0x2A05, 0x299B, 0x2991, 0x2987, 0x291D, 0x2913, 0x2909, 0x289F, // Band A
0x2903, 0x290C, 0x2916, 0x291F, 0x2989, 0x2992, 0x299C, 0x2A05, // Band B
0x2895, 0x288B, 0x2881, 0x2817, 0x2A0F, 0x2A19, 0x2A83, 0x2A8D, // Band E
0x2906, 0x2910, 0x291A, 0x2984, 0x298E, 0x2998, 0x2A02, 0x2A0C, // Immersion normal
0x281D, 0x288F, 0x2902, 0x2914, 0x2987, 0x2999, 0x2A0C, 0x2A1E, // Immersion Raceband
0x2609, 0x261C, 0x268E, 0x2701, 0x2713, 0x2786, 0x2798, 0x280B // Band D / 5.3
};
// Channels in mhz
const uint16_t channelFreqTable[] PROGMEM = {
// Channel 1 - 8
5865, 5845, 5825, 5805, 5785, 5765, 5745, 5725, // Band A
5733, 5752, 5771, 5790, 5809, 5828, 5847, 5866, // Band B
5705, 5685, 5665, 5645, 5885, 5905, 5925, 5945, // Band E
5740, 5760, 5780, 5800, 5820, 5840, 5860, 5880, // Immersion normal
5658, 5695, 5732, 5769, 5806, 5843, 5880, 5917, // Immersion Raceband
5362, 5399, 5436, 5473, 5510, 5547, 5584, 5621 // New Band D / 5300 mhz
};
uint8_t channel = 24; // set fixed channel here
uint8_t channelIndex = 0; // set index channel
///////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
/////////////////////////// MAIN LOGO IMAGE //////////////////////////////////////////////////////////////////////////////////////
const unsigned char border [] PROGMEM = {
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF,
0xF7, 0xFF, 0xFF, 0xEF, 0xFF, 0x7F, 0xBF, 0x7B, 0xDE, 0xFD, 0xFE, 0xFF, 0xF7, 0xFF, 0xFF, 0xEF,
0xF8, 0xF9, 0xF9, 0xF3, 0xF7, 0x3F, 0x3F, 0x71, 0x9C, 0xF8, 0xFC, 0xCF, 0xCF, 0x9F, 0x9F, 0x1F,
0xFC, 0x1C, 0x7C, 0x71, 0xF1, 0x1F, 0x1F, 0x21, 0x8C, 0xB8, 0xF8, 0x8F, 0x8E, 0x3E, 0x38, 0x3F,
0xE6, 0x00, 0x0C, 0x38, 0x70, 0x0E, 0x06, 0x00, 0x08, 0x10, 0x70, 0x1E, 0x18, 0x38, 0x00, 0x67,
0xF0, 0x00, 0x00, 0x08, 0x18, 0x02, 0x02, 0x00, 0x00, 0x00, 0x60, 0x18, 0x10, 0x60, 0x00, 0x1F,
0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF,
0xF1, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xCF,
0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF,
0xFF, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFF,
0xF1, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0x8F,
0xFC, 0x08, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x3F,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF,
0xFF, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xFF,
0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07,
0xFF, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F,
0xFF, 0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF,
0xE0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFF,
0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7F,
0xFF, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F, 0xFF,
0xFF, 0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xFF,
0xFE, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F,
0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F,
0xFF, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F,
0xFF, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0xFF,
0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7F,
0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07,
0xFF, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xFF,
0xFF, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFF, 0xFF,
0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xFF,
0xFF, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F,
0xFE, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7F,
0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F,
0xC3, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x1F, 0xC3,
0xFF, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFF,
0xFF, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F,
0xFF, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xFF,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0xFF,
0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xFF,
0xFF, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7F,
0xFF, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7F,
0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x30, 0x3F,
0xF1, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0x8F,
0xFF, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFF,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF,
0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x3F,
0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0x8F,
0xFF, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xFF,
0xFC, 0x00, 0x00, 0x00, 0x00, 0x04, 0x00, 0x00, 0x00, 0x00, 0x20, 0x00, 0x00, 0x00, 0x00, 0x3F,
0xF8, 0x00, 0x06, 0x00, 0x18, 0x0E, 0x08, 0x00, 0x00, 0x10, 0x70, 0x00, 0x10, 0x00, 0x00, 0x1F,
0xE6, 0x00, 0x1C, 0x00, 0x70, 0x1E, 0x08, 0x10, 0x08, 0x10, 0x78, 0x00, 0x18, 0x00, 0x00, 0x67,
0xFC, 0x1C, 0x7C, 0x01, 0xF1, 0x1F, 0x1C, 0x31, 0x8C, 0x38, 0xF8, 0x8C, 0x0E, 0x36, 0x38, 0x3F,
0xF8, 0xF9, 0xF8, 0x73, 0xF3, 0xBF, 0x3C, 0x79, 0x9C, 0x38, 0xFD, 0xCF, 0x8F, 0x9F, 0x9F, 0x1F,
0xF7, 0xFF, 0xFF, 0xEF, 0xFF, 0xFF, 0xBD, 0x7B, 0xDE, 0xBD, 0xFF, 0xFF, 0xF7, 0xFF, 0xFF, 0xEF,
0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF
};
const unsigned char flagy [] PROGMEM = { // Main logo ,, //
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x80, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x01, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x40, 0x00, 0x00, 0x03, 0x80, 0x00, 0x00, 0x00, 0x40, 0x00,
0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0xC0, 0x00, 0x00, 0x07, 0xC0, 0x38, 0x00, 0x01, 0xC0, 0x00,
0x00, 0x07, 0xC0, 0x78, 0x06, 0x01, 0xC0, 0x00, 0x00, 0x07, 0xC3, 0xFE, 0x3F, 0x81, 0xC0, 0x00,
0x00, 0x07, 0xCF, 0xFF, 0xFF, 0xF1, 0xC0, 0x00, 0x00, 0x07, 0xFF, 0xFE, 0x3F, 0xF9, 0xC0, 0x00,
0x00, 0x07, 0xFF, 0xFC, 0x3F, 0xFF, 0xC0, 0x00, 0x00, 0x07, 0xFF, 0xF8, 0x1F, 0xFF, 0xC0, 0x00,
0x00, 0x07, 0x9F, 0xF8, 0x9F, 0xFF, 0xC0, 0x00, 0x00, 0x03, 0x9F, 0xFB, 0xEF, 0xFC, 0xC0, 0x00,
0x00, 0x03, 0x9F, 0xF7, 0xEF, 0xF8, 0xC0, 0x00, 0x00, 0x03, 0x8F, 0xEF, 0xF7, 0xF8, 0xC0, 0x00,
0x00, 0x03, 0x87, 0xCF, 0xF3, 0xF0, 0xC0, 0x00, 0x00, 0x03, 0x80, 0x1F, 0xF8, 0x00, 0xC0, 0x00,
0x00, 0x03, 0x83, 0x3F, 0xFC, 0x00, 0xC0, 0x00, 0x00, 0x03, 0xC3, 0xFF, 0xFF, 0x80, 0xC0, 0x00,
0x00, 0x01, 0xE3, 0xFF, 0xFF, 0xC1, 0xC0, 0x00, 0x00, 0x01, 0xFF, 0xFF, 0xFF, 0xF7, 0x80, 0x00,
0x00, 0x01, 0xFF, 0xF7, 0xEF, 0xFF, 0x80, 0x00, 0x00, 0x01, 0xFF, 0xEF, 0xF7, 0xFF, 0x80, 0x00,
0x00, 0x18, 0xFF, 0xEF, 0xF7, 0xFF, 0x90, 0x00, 0x00, 0x7C, 0xFF, 0xE4, 0x27, 0xFF, 0x3E, 0x00,
0x01, 0xFE, 0xFF, 0xE3, 0xC7, 0xFF, 0x7F, 0x80, 0x07, 0xFF, 0x7F, 0x80, 0x01, 0xFE, 0xFF, 0xE0,
0x3F, 0xFF, 0xFF, 0x39, 0x9C, 0xFC, 0xFF, 0xFC, 0x7F, 0xFF, 0xFF, 0x65, 0xA6, 0xFF, 0xFF, 0xFE,
0x7F, 0xFF, 0xFF, 0xF6, 0x6F, 0xFF, 0xFF, 0xFE, 0x3F, 0xFF, 0xFF, 0xF2, 0x4F, 0xFF, 0xFF, 0xFC,
0x1F, 0xFF, 0xFF, 0xFA, 0x5F, 0xFF, 0xFF, 0xF8, 0x1F, 0xFF, 0x3F, 0xFE, 0x7F, 0xFC, 0xFF, 0xF8,
0x1F, 0xF0, 0x7F, 0xFC, 0x3F, 0xFE, 0x0F, 0xF8, 0x1F, 0x30, 0xFF, 0xE3, 0x87, 0xFF, 0x0C, 0xF8,
0x06, 0x11, 0xFF, 0xFF, 0xFF, 0xFF, 0x88, 0xE0, 0x07, 0x19, 0xF8, 0x7F, 0xFE, 0x7F, 0x90, 0xE0,
0x07, 0x1F, 0xFC, 0x3F, 0xFC, 0x3F, 0xF9, 0xE0, 0x03, 0xBF, 0xFC, 0x3F, 0xF8, 0x3F, 0xFD, 0xC0,
0x01, 0xFF, 0xFC, 0x1F, 0xF8, 0x3F, 0xFF, 0x80, 0x01, 0xFF, 0xFE, 0x7F, 0xFE, 0x7F, 0xFF, 0x80,
0x00, 0xFF, 0xFE, 0xFF, 0xFE, 0x7F, 0xFF, 0x00, 0x00, 0x3F, 0xFE, 0x3F, 0xFC, 0x7F, 0xFC, 0x00,
0x00, 0x3F, 0xFC, 0x3F, 0xFC, 0x3F, 0xFC, 0x00, 0x00, 0x1F, 0xF0, 0x3F, 0xF8, 0x0F, 0xFC, 0x00,
0x00, 0x3F, 0xC0, 0x18, 0x18, 0x03, 0xF8, 0x00, 0x00, 0x1F, 0x00, 0x00, 0x00, 0x00, 0xFC, 0x00,
0x00, 0x1C, 0x00, 0x00, 0x00, 0x00, 0x38, 0x00, 0x00, 0x08, 0x00, 0x00, 0x00, 0x00, 0x18, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00
};
const unsigned char myBitmap2 [] PROGMEM = { // Main logo ,, //
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x03, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFF, 0xFF, 0xF0, 0x00,
0x00, 0x00, 0x00, 0x03, 0xB0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0x80, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x03, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x07, 0xC0, 0x00, 0x00, 0x00,
0x00, 0x00, 0x03, 0xFF, 0xFF, 0xC0, 0x00, 0x00, 0x00, 0x00, 0x03, 0xFF, 0xFF, 0xC0, 0x00, 0x00,
0x00, 0x00, 0x02, 0x0F, 0xE0, 0x40, 0x00, 0x00, 0x00, 0x00, 0x02, 0x7F, 0xFC, 0x40, 0x00, 0x00,
0x00, 0x00, 0x02, 0x7F, 0xFE, 0x40, 0x20, 0x00, 0x00, 0x04, 0x02, 0x7F, 0xFE, 0x40, 0x20, 0x00,
0x00, 0x00, 0x07, 0xFF, 0xFF, 0xC0, 0x00, 0x00, 0x00, 0x07, 0xFF, 0xBF, 0xFF, 0xFF, 0xE0, 0x00,
0x00, 0x07, 0xFF, 0xFF, 0xFB, 0xFF, 0xE0, 0x00, 0x00, 0x0F, 0x3D, 0xFF, 0xF7, 0xBD, 0xF0, 0x00,
0x00, 0x0F, 0x18, 0xFF, 0xFF, 0x18, 0xF0, 0x00, 0x00, 0x1F, 0x18, 0xFF, 0xFF, 0x18, 0xF0, 0x00,
0x00, 0x1F, 0xBD, 0xFF, 0xFF, 0xBD, 0xF8, 0x00, 0x00, 0x1F, 0xFF, 0xFF, 0xFF, 0xFF, 0xF8, 0x00,
0x00, 0x1F, 0x83, 0xFF, 0xFF, 0xC3, 0xF8, 0x00, 0x00, 0x1F, 0x38, 0xFE, 0xFF, 0x18, 0xF8, 0x00,
0x00, 0x1E, 0xFE, 0x7D, 0x7E, 0x7E, 0x78, 0x00, 0x00, 0x1D, 0xFF, 0x7E, 0x7C, 0xFF, 0x38, 0x00,
0x00, 0x1D, 0x01, 0xAF, 0xED, 0x00, 0xB8, 0x00, 0x00, 0x19, 0x11, 0xA7, 0xED, 0x01, 0xB8, 0x00,
0x00, 0x1B, 0xFF, 0xBF, 0xFD, 0xFF, 0xB8, 0x00, 0x00, 0x19, 0x11, 0xA7, 0xED, 0x99, 0xB8, 0x00,
0x00, 0x19, 0x01, 0xA7, 0xED, 0x00, 0xB8, 0x00, 0x00, 0x1D, 0xFF, 0x7C, 0x3C, 0xFF, 0x38, 0x00,
0x00, 0x1E, 0xFE, 0x7D, 0xBE, 0x7E, 0x78, 0x00, 0x00, 0x1F, 0x38, 0xFD, 0xBF, 0x3C, 0xF8, 0x00,
0x00, 0x1F, 0x83, 0xFD, 0xFF, 0x81, 0xF8, 0x00, 0x00, 0x1F, 0xFF, 0xFC, 0x7F, 0xFF, 0xF8, 0x00,
0x00, 0x1F, 0xD3, 0xFC, 0x7F, 0xDB, 0xF8, 0x00, 0x00, 0x1F, 0xDF, 0xFF, 0xFF, 0xDB, 0xF8, 0x00,
0x00, 0x1F, 0xFF, 0xFF, 0xFF, 0xFF, 0xF8, 0x00, 0x00, 0x1F, 0xFF, 0x80, 0x21, 0xFF, 0xF8, 0x00,
0x00, 0x1F, 0x9F, 0x00, 0x01, 0xF9, 0xF8, 0x00, 0x00, 0x1F, 0x1F, 0x00, 0x01, 0xF8, 0xF0, 0x00,
0x00, 0x1F, 0x37, 0x00, 0x01, 0xE8, 0xF0, 0x00, 0x00, 0x0F, 0x23, 0x00, 0x01, 0xCC, 0xF0, 0x00,
0x00, 0x0F, 0x23, 0x00, 0x01, 0xC5, 0xF0, 0x00, 0x00, 0x0F, 0xFF, 0x00, 0x01, 0xFF, 0xE0, 0x00,
0x00, 0x07, 0xFF, 0x00, 0x01, 0xFF, 0xE0, 0x00, 0x00, 0x03, 0xFF, 0xBF, 0xFD, 0xFF, 0xC0, 0x00,
0x00, 0x01, 0xFF, 0xFF, 0xFF, 0xFF, 0x00, 0x00, 0x00, 0x00, 0x1D, 0xFF, 0xFF, 0x20, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00
};
const unsigned char hand [] PROGMEM = { // Main logo ,, //
0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0x78, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xF8, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x00, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x01, 0xF8, 0x00, 0x00,
0x00, 0x00, 0x00, 0x00, 0x71, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0xF1, 0xF3, 0xE0, 0x00,
0x00, 0x00, 0x00, 0x01, 0xF1, 0xF3, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x01, 0xF1, 0xF3, 0xE0, 0x00,
0x00, 0x00, 0x00, 0x03, 0xF1, 0xE3, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x03, 0xF3, 0xE3, 0xE0, 0x00,
0x00, 0x00, 0x00, 0x01, 0xF3, 0xE3, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x01, 0xC3, 0xE3, 0xE0, 0x00,
0x00, 0x00, 0x00, 0x03, 0xE3, 0xE3, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x03, 0xE3, 0xE3, 0xC0, 0x00,
0x00, 0x00, 0x00, 0x03, 0xE3, 0xC3, 0xE0, 0x00, 0x00, 0x00, 0x00, 0x03, 0xE3, 0x83, 0xE1, 0xE0,
0x00, 0x00, 0x00, 0x03, 0xE3, 0x83, 0xE3, 0xF0, 0x00, 0x00, 0x00, 0x01, 0xC3, 0x83, 0xE3, 0xF8,
0x00, 0x00, 0x00, 0x01, 0x07, 0xC3, 0xC3, 0xF8, 0x00, 0x00, 0x00, 0x03, 0x87, 0xC3, 0xC3, 0xF8,
0x00, 0x00, 0x00, 0x07, 0xC7, 0xC3, 0x83, 0xF0, 0x00, 0x00, 0x00, 0x07, 0x87, 0xC7, 0xC3, 0xF0,
0x00, 0x00, 0x00, 0x0F, 0x87, 0xC7, 0xC1, 0xF0, 0x00, 0x00, 0x00, 0x0F, 0x87, 0xCF, 0xC0, 0xF0,
0x00, 0x00, 0x00, 0x0F, 0x83, 0x8F, 0xC3, 0xF0, 0x00, 0x00, 0x00, 0x07, 0x80, 0x0F, 0xC3, 0xF0,
0x00, 0x00, 0x00, 0x01, 0x00, 0x07, 0x83, 0xF0, 0x00, 0x00, 0x00, 0x00, 0x00, 0x03, 0x03, 0xE0,
0x00, 0x00, 0x00, 0x03, 0x80, 0x00, 0x03, 0xE0, 0x10, 0x00, 0x00, 0x07, 0xE6, 0x00, 0x07, 0xC0,
0x3C, 0x00, 0x00, 0x0F, 0xFF, 0xF8, 0x0F, 0xC0, 0x7E, 0x00, 0x00, 0x0F, 0xFF, 0xFC, 0x0F, 0xC0,
0x3F, 0x80, 0x00, 0x0F, 0xFF, 0xFE, 0x0F, 0xC0, 0x1F, 0xC0, 0x00, 0x0F, 0xFF, 0xFF, 0xC7, 0x80,
0x0F, 0xC0, 0x00, 0x0F, 0xBF, 0xDF, 0xF7, 0x00, 0x07, 0xC0, 0x00, 0x0F, 0x7F, 0xEF, 0xFC, 0x00,
0x03, 0xC0, 0x00, 0x0F, 0x7F, 0xEF, 0xFE, 0x00, 0x00, 0x00, 0x00, 0x06, 0x7F, 0xE7, 0xFE, 0x00,
0x00, 0x00, 0x00, 0x02, 0x7F, 0xE7, 0xFE, 0x00, 0x00, 0x00, 0x00, 0x07, 0x30, 0xEF, 0xFF, 0x00,
0x00, 0x00, 0x00, 0x3F, 0x06, 0x0F, 0xFF, 0x00, 0x00, 0x00, 0x00, 0xFF, 0x0F, 0x0F, 0xFF, 0x00,
0x00, 0x00, 0x03, 0xFC, 0x00, 0x03, 0xFF, 0x00, 0x00, 0x00, 0x07, 0xF0, 0x0F, 0x00, 0xFF, 0x00,
0x00, 0x00, 0x0F, 0xC0, 0x0F, 0x06, 0x3F, 0x00, 0x00, 0x00, 0x1F, 0xDE, 0x4F, 0xA7, 0x9F, 0x00,
0x00, 0x00, 0x1F, 0xBF, 0x7F, 0x6F, 0xDF, 0x00, 0x00, 0x00, 0x3F, 0xBF, 0x20, 0x4F, 0xFF, 0x00,
0x00, 0x00, 0x3F, 0xBF, 0x90, 0x5F, 0xFE, 0x00, 0x00, 0x00, 0x7F, 0xFF, 0xC0, 0x3F, 0xFC, 0x00,
0x00, 0x00, 0x7F, 0xFF, 0xE0, 0x7F, 0xF8, 0x00, 0x00, 0x00, 0x3F, 0xFF, 0xE6, 0x3F, 0xF0, 0x00,
0x00, 0x00, 0x3F, 0xFF, 0xCF, 0x1F, 0xE0, 0x00, 0x00, 0x00, 0x1F, 0xFE, 0x3F, 0xC1, 0xC0, 0x00,
0x00, 0x00, 0x0F, 0xFF, 0xFF, 0xFF, 0x80, 0x00, 0x00, 0x00, 0x03, 0xFF, 0xFF, 0xFF, 0x00, 0x00,
0x00, 0x00, 0x00, 0xFF, 0xFF, 0xFE, 0x00, 0x00, 0x00, 0x00, 0x00, 0x7F, 0xFF, 0xFC, 0x00, 0x00,
0x00, 0x00, 0x00, 0x3F, 0xFF, 0xF8, 0x00, 0x00, 0x00, 0x00, 0x00, 0x0F, 0xFF, 0xF0, 0x00, 0x00,
0x00, 0x00, 0x00, 0x03, 0xFC, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00, 0x00
};
///////////////////////////////////////////////////////////////////////////////////////////////////////
//
#define PSTR2(x) PSTRtoBuffer_P(PSTR(x)) // just a Parse String 2 Buffer method ,,
char PSTR2_BUFFER[30]; // adjust size depending on need.
char *PSTRtoBuffer_P(PGM_P str) {
uint8_t c = '\0', i = 0;
for (; (c = pgm_read_byte(str)) && i < sizeof(PSTR2_BUFFER); str++, i++) PSTR2_BUFFER[i] = c;
PSTR2_BUFFER[i] = c;
return PSTR2_BUFFER;
}
////////////////////////////////////////////////////////////////////////////////////////////////////////
////////////// SETUP /////////////////////////////////////////////////////////////
//////////////////////////////////////////////////////////////////////////////////////////////////////
void setup() // just al the setup and pins //
{
// Pinmodes of all pins used
#ifdef osd
Serial.begin(19200); // forgot to turn it of
#endif
#ifdef v3
pinMode(OLEDSW, OUTPUT);
digitalWrite(OLEDSW, HIGH);
#endif
pinMode(ledPin, OUTPUT);
#ifdef Realac
pinMode(DIV1_PIN, OUTPUT);
pinMode(DIV2_PIN, OUTPUT);
#endif
#ifdef Furious
pinMode(DIV1_PIN, OUTPUT);
pinMode(DIV2_PIN, OUTPUT);
#endif
pinMode (slaveSelectPin, OUTPUT);
pinMode (spiDataPin, OUTPUT);
pinMode (spiClockPin, OUTPUT);
digitalWrite(ledPin, HIGH);
#ifdef white
display.begin(SSD1306_SWITCHCAPVCC, 0x3C);
#endif
#ifdef color
display.begin(SSD1306_SWITCHCAPVCC, 0x3D);
#endif
display.clearDisplay();
display.drawBitmap(30, 0, flagy, 64, 64, 1);
display.display();
delay (2000);
display.clearDisplay();
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(10, 20);
display.print("Made By Buzz Fly");
display.setCursor(12, 40);
display.print(" Special made !");
display.display();
display.setTextSize(1);
delay (1500);
display.clearDisplay();
digitalWrite(ledPin, HIGH);
delay (20);
channel = EEPROM.read(1);
HISFILT = EEPROM.read(2);
delay (10);
digitalWrite(DIV1_PIN, HIGH);
digitalWrite(DIV2_PIN, LOW); // setting Max4066 IC switch on right output Video 1
delay (100);
test(); // channel selector stuff //
delay (10);
#ifdef Realac
pinMode(BUT1, INPUT);
digitalWrite(BUT1, INPUT_PULLUP);
pinMode(BUT2, INPUT);
digitalWrite(BUT2, INPUT_PULLUP);
pinMode(BUT3, INPUT);
digitalWrite(BUT3, INPUT_PULLUP);
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
favorread();
#endif
#ifdef Furious
pinMode(BUT1, INPUT);
digitalWrite(BUT1, INPUT_PULLUP);
pinMode(BUT2, INPUT);
digitalWrite(BUT2, INPUT_PULLUP);
pinMode(BUT3, INPUT);
digitalWrite(BUT3, INPUT_PULLUP);
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
favorread();
#endif
#ifdef Buzz
irrecv.enableIRIn();
channel = EEPROM.read(1);
delay (10);
digitalWrite(DIV1_PIN, HIGH);
digitalWrite(DIV2_PIN, LOW); // setting Max4066 IC switch on right output Video 1
digitalWrite(OSD_PIN, LOW);
delay (100);
#endif
}
////////////////////////////////////////////////////////////////////////////////////////////////////////
void test () { // setting channel true ch 1 ch 2 ch 3 of the module !
uint8_t i;
uint16_t channelData;
if (channel == 48)channelData = pgm_read_word_near(channelTable + fav1);
if (channel == 49)channelData = pgm_read_word_near(channelTable + fav2);
if (channel == 50)channelData = pgm_read_word_near(channelTable + fav3);
if (channel == 51)channelData = pgm_read_word_near(channelTable + fav4);
if (channel == 52)channelData = pgm_read_word_near(channelTable + fav5);
if (channel == 53)channelData = pgm_read_word_near(channelTable + fav6);
if (channel == 54)channelData = pgm_read_word_near(channelTable + fav7);
if (channel == 55)channelData = pgm_read_word_near(channelTable + fav8);
if (channel <= 47)channelData = pgm_read_word_near(channelTable + channel);
EEPROM.write(1, channel);
SERIAL_ENABLE_HIGH();
delayMicroseconds(1);
SERIAL_ENABLE_LOW();
SERIAL_SENDBIT0();
SERIAL_SENDBIT0();
SERIAL_SENDBIT0();
SERIAL_SENDBIT1();
SERIAL_SENDBIT0();
// remaining zeros
for (i = 20; i > 0; i--)
SERIAL_SENDBIT0();
// Clock the data in
SERIAL_ENABLE_HIGH();
delay(2);
delayMicroseconds(1);
SERIAL_ENABLE_LOW();
SERIAL_ENABLE_HIGH();
SERIAL_ENABLE_LOW();
SERIAL_SENDBIT1();
SERIAL_SENDBIT0();
SERIAL_SENDBIT0();
SERIAL_SENDBIT0();
SERIAL_SENDBIT1();
for (i = 16; i > 0; i--)
{
// Is bit high or low?
if (channelData & 0x1)
{
SERIAL_SENDBIT1();
}
else
{
SERIAL_SENDBIT0();
}
// Shift bits along to check the next one
channelData >>= 1;
}
// Remaining D16-D19
for (i = 4; i > 0; i--)
SERIAL_SENDBIT0();
// Finished clocking data in
SERIAL_ENABLE_HIGH();
delayMicroseconds(1);
digitalWrite(slaveSelectPin, LOW); // shuting down the 5v of the spi //
digitalWrite(spiClockPin, LOW);
digitalWrite(spiDataPin, LOW);
}
void SERIAL_SENDBIT1()
{
digitalWrite(spiClockPin, LOW);
delayMicroseconds(1);
digitalWrite(spiDataPin, HIGH);
delayMicroseconds(1);
digitalWrite(spiClockPin, HIGH);
delayMicroseconds(1);
digitalWrite(spiClockPin, LOW);
delayMicroseconds(1);
}
void SERIAL_SENDBIT0()
{
digitalWrite(spiClockPin, LOW);
delayMicroseconds(1);
digitalWrite(spiDataPin, LOW);
delayMicroseconds(1);
digitalWrite(spiClockPin, HIGH);
delayMicroseconds(1);
digitalWrite(spiClockPin, LOW);
delayMicroseconds(1);
}
void SERIAL_ENABLE_LOW()
{
delayMicroseconds(1);
digitalWrite(slaveSelectPin, LOW);
delayMicroseconds(1);
}
void SERIAL_ENABLE_HIGH()
{
delayMicroseconds(1);
digitalWrite(slaveSelectPin, HIGH);
delayMicroseconds(1);
}
//////////////////////////////////////////////////////////////////////////
///////// DEXTERBOT AkA BuzzFLy !! HisTiric filter method !! ////////////
void turboswitch() {
HIS1 = HIS1 + 1; /// up counter for switch
HIS2 = HIS2 + 1;
#ifdef Furious
rssi2 = analogRead(A6); //rssi main module
delay (25);
rssi3 = analogRead(A7); //rssi second mouduleb
#endif
#ifdef Realac
rssi2 = analogRead(A6); //rssi main module
delay (25);
rssi3 = analogRead(A7); //rssi second mouduleb
#endif
#ifdef Buzz
rssi2 = analogRead(A1); //rssi main module
delay (25);
rssi3 = analogRead(A2); //rssi second mouduleb
#endif
if (rssi2 > rssi1_MAX ) rssi1_MAX = rssi2;
if (rssi3 > rssi2_MAX ) rssi2_MAX = rssi3;
if (rssi2 < rssi1_MIN ) rssi1_MIN = rssi2;
if (rssi3 < rssi2_MIN ) rssi2_MIN = rssi3;
if (rssi2 > rssi3 )HIS2 = 0; // if main module signal is higer then second module
if (rssi2 < rssi3 )HIS1 = 0; // if second module signal is higer then main module
/// his buffer set on default 15 ,,
if (HIS1 > HISFILT)swt = 0; //if main module has higer signal
else if (HIS2 > HISFILT)swt = 1;
if (swt == 0 ) {
digitalWrite(DIV2_PIN, LOW);
delay (NOBLACK);
digitalWrite(DIV1_PIN, HIGH);
digitalWrite(ledPin, LOW);
display.setCursor(72, 40);
if (buttonState1 != LOW && selector == 4) {
display.print("RX ON 1");
display.setCursor(75, 58);
display.print("<<<<");
}
display.display();
}
if (swt == 1) {
digitalWrite(DIV1_PIN, LOW);
delay (NOBLACK);
digitalWrite(DIV2_PIN, HIGH);
digitalWrite(ledPin, HIGH);
display.setCursor(72, 40);
if (buttonState1 != LOW && selector == 4) {
display.print("RX ON 2");
display.setCursor(98, 58);
display.print(">>>>");
}
display.display();
}
}
////////////////////////////////////////////////////////////////////////////////////////////////////////////////
///////////////////////////////////////////////////////////////////////////////////////////
void autocalib() { // autocalibrating continous when on !
#ifdef Furious
rssi2 = analogRead(A6); //rssi main module
delay (25);
rssi3 = analogRead(A7); //rssi second moudule
#endif
#ifdef Realac
rssi2 = analogRead(A6); //rssi main module
delay (25);
rssi3 = analogRead(A7); //rssi second mouduleb
#endif
#ifdef Buzz
rssi2 = analogRead(A0); //rssi main module
delay (25);
rssi3 = analogRead(A1); //rssi second mouduleb
rssi2 = constrain(rssi2, rssi1_MIN, rssi1_MAX);
rssi3 = constrain(rssi3, rssi2_MIN, rssi2_MAX);
#endif
if (rssi2 > rssi1_MAX ) rssi1_MAX = rssi2;
if (rssi3 > rssi2_MAX ) rssi2_MAX = rssi3;
if (rssi2 < rssi1_MIN ) rssi1_MIN = rssi2;
if (rssi3 < rssi2_MIN ) rssi2_MIN = rssi3;
rssi2 = map(rssi2, rssi1_MAX, rssi1_MIN, 50, 2); //rssi mapped
rssi3 = map(rssi3, rssi2_MAX, rssi2_MIN, 50, 2); //rssi mapped
//ZzzzzzzzzzzzzzzzzzzzzzzaA if (rssi2 < SIG_ALARM || rssi3 < SIG_ALARM )sigalarm(); //triggers sig alarm !
}
///////////////////////////////////////////////////////////////////////////////////////////
////////////////////////////////////////////////////////////////////////////////////
#ifdef Realac
///////////////////////////////////////////////////////////////////////
void loop () { // loop used onley for switching //
if (dp > screentime) {
turbo();
dp = screentime + 5;
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState0 == LOW || buttonState1 == LOW || buttonState2 == LOW) dp = 0;
return;
}
turboswitch();
dp++;
#ifdef osd
osdt ++;
if (osdt > 2) {
osd();
osdt = 0;
}
#endif
if (selector == 1) {
search();
return;
}
if (selector == 2) {
filter();
return;
}
if (selector == 3) {
scope();
return;
}
if (selector == 4) {
manual();
return;
}
if (selector == 5) {
favor();
return;
}
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState0 == LOW) {
scan = scan - 1;
dp = 0;
}
if (buttonState1 == LOW) {
selector = scan;
dp = 0;
}
if (buttonState2 == LOW) {
scan = scan + 1;
dp = 0;
}
if (scan >= 5)scan = 1;
if (scan < 1)scan = 1;
display.clearDisplay();
display.drawBitmap(0, 0, border, 128, 64, 1);
display.setTextSize(1);
display.fillRect(3, 10 * scan + 3, 120, 10, WHITE);
display.setTextColor(scan == 0 ? BLACK : WHITE);
display.setCursor(0, 1);
display.print(PSTR2(" "));
display.setTextColor(scan == 1 ? BLACK : WHITE);
display.setCursor(2, 10 * 1 + 5);
display.print(PSTR2(" SEARCH "));
display.setTextColor(scan == 2 ? BLACK : WHITE);
display.setCursor(2, 10 * 2 + 5);
display.print(PSTR2(" SET FILTER L M H"));
display.setTextColor(scan == 3 ? BLACK : WHITE);
display.setCursor(2, 10 * 3 + 5);
display.print(PSTR2(" SCOPE "));
display.setTextColor(scan == 4 ? BLACK : WHITE);
display.setCursor(2, 10 * 4 + 5);
display.print(PSTR2(" BACK "));
display.display();
digitalWrite(ledPin, LOW);
}
#endif
#ifdef Furious
///////////////////////////////////////////////////////////////////////
void loop () { // loop used onley for switching //
if (dp > screentime) {
turbo();
dp = screentime + 5;
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState0 == LOW || buttonState1 == LOW || buttonState2 == LOW) dp = 0;
return;
}
turboswitch();
dp++;
#ifdef osd
osdt ++;
if (osdt > 2) {
osd();
osdt = 0;
}
#endif
if (selector == 1) {
search();
return;
}
if (selector == 2) {
filter();
return;
}
if (selector == 3) {
scope();
return;
}
if (selector == 4) {
manual();
return;
}
if (selector == 5) {
favor();
return;
}
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState0 == LOW) {
scan = scan - 1;
dp = 0;
}
if (buttonState1 == LOW) {
selector = scan;
dp = 0;
}
if (buttonState2 == LOW) {
scan = scan + 1;
dp = 0;
}
if (scan >= 5)scan = 1;
if (scan < 1)scan = 1;
display.clearDisplay();
display.drawBitmap(0, 0, border, 128, 64, 1);
display.setTextSize(1);
display.fillRect(3, 10 * scan + 3, 120, 10, WHITE);
display.setTextColor(scan == 0 ? BLACK : WHITE);
display.setCursor(0, 1);
display.print(PSTR2(" "));
display.setTextColor(scan == 1 ? BLACK : WHITE);
display.setCursor(2, 10 * 1 + 5);
display.print(PSTR2(" SEARCH "));
display.setTextColor(scan == 2 ? BLACK : WHITE);
display.setCursor(2, 10 * 2 + 5);
display.print(PSTR2(" SET FILTER L M H"));
display.setTextColor(scan == 3 ? BLACK : WHITE);
display.setCursor(2, 10 * 3 + 5);
display.print(PSTR2(" SCOPE "));
display.setTextColor(scan == 4 ? BLACK : WHITE);
display.setCursor(2, 10 * 4 + 5);
display.print(PSTR2(" BACK "));
display.display();
digitalWrite(ledPin, LOW);
}
#endif
#ifdef Buzz
void loop() {
turboswitch();
delay (20);
autocalib();
scr = scr + 1;
display.clearDisplay();
// Ir reactions //
if (irrecv.decode(&results)) {
scp = 0;
display.clearDisplay();
while (scp < 10) {
scp++;
display.drawCircle(63, display.height() / 2, scp * 2, WHITE);
display.display();
digitalWrite(ledPin, HIGH);
}
scp = 0;
if (results.value == Ircode2 || results.value == Ircode22) {
channel = channel - 8;
if (channel < 1)channel = 0;
mnu = 2;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" BAND -"); // disable
display.display();
delay (200);
display.clearDisplay();
test();
scr = 95;
delay (10);
}
if (results.value == Ircode1 || results.value == Ircode11) {
channel = channel + 8;
if (channel > 47)channel = 0;
mnu = 2;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" BAND +"); // disable
display.display();
delay (200);
display.clearDisplay();
test();
scr = 95;
delay (10);
}
if (results.value == Ircode3 || results.value == Ircode33) {
channel = channel + 1;
display.clearDisplay();
display.setTextSize(4);
display.setCursor(0, 20);
display.print(" UP "); // disable
display.display();
delay (200);
display.setTextSize(1);
test();
scr = 95;
delay (10);
}
if (results.value == Ircode4 || results.value == Ircode44) {
channel = channel - 1;
display.clearDisplay();
display.setTextSize(4);
display.setCursor(0, 20);
display.print(" DOWN "); // disable
display.display();
delay (200);
display.setTextSize(1);
test();
scr = 95;
delay (10);
}
if (results.value == Ircode5 || results.value == Ircode55) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" SCAN "); // disable
display.display();
delay (200);
display.setTextSize(1);
best = 0;
strong();
}
if (results.value == Ircode6 || results.value == Ircode66) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" SEARCH "); // disable
display.display();
delay (200);
display.setTextSize(1);
best = 0;
search();
}
if (results.value == Ircode7 || results.value == Ircode77) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" SCOPE "); // disable
display.display();
delay (200);
display.setTextSize(1);
best = 0;
scope();
}
irrecv.resume(); // Receive the next value
delay (100);
if (channel > 47)channel = 0;
if (channel < 1 )channel = 0;
display.clearDisplay();
}
// Oled Stuff //
display.clearDisplay();
if (scr < 40) {
display.drawBitmap(1, 1, myBitmap2, 64, 64, 1);
}
display.setTextSize(1);
if (scr > 40 && scr < 95) { // NOT USED IN V2 DISABLE FOR USE
volt = analogRead(A1);
volt = map(volt, 1024, 0, 50, 0);
delay (10);
display.fillRect(30, 0, 1, 63, WHITE);
display.fillRect(33, volt, 30, 63, WHITE);
display.fillRect(64, 0, 1, 63, WHITE);
display.fillRect(45, 37, 5, 40, BLACK);
display.fillRect(40, 40, 15, 63, BLACK);
display.setCursor(0, 50);
display.print("BATT");
display.setCursor(8, volt);
volt = analogRead(A1);
volt = map(volt, 1024, 0, 0, 60);
display.print(volt);
display.print(">");
}
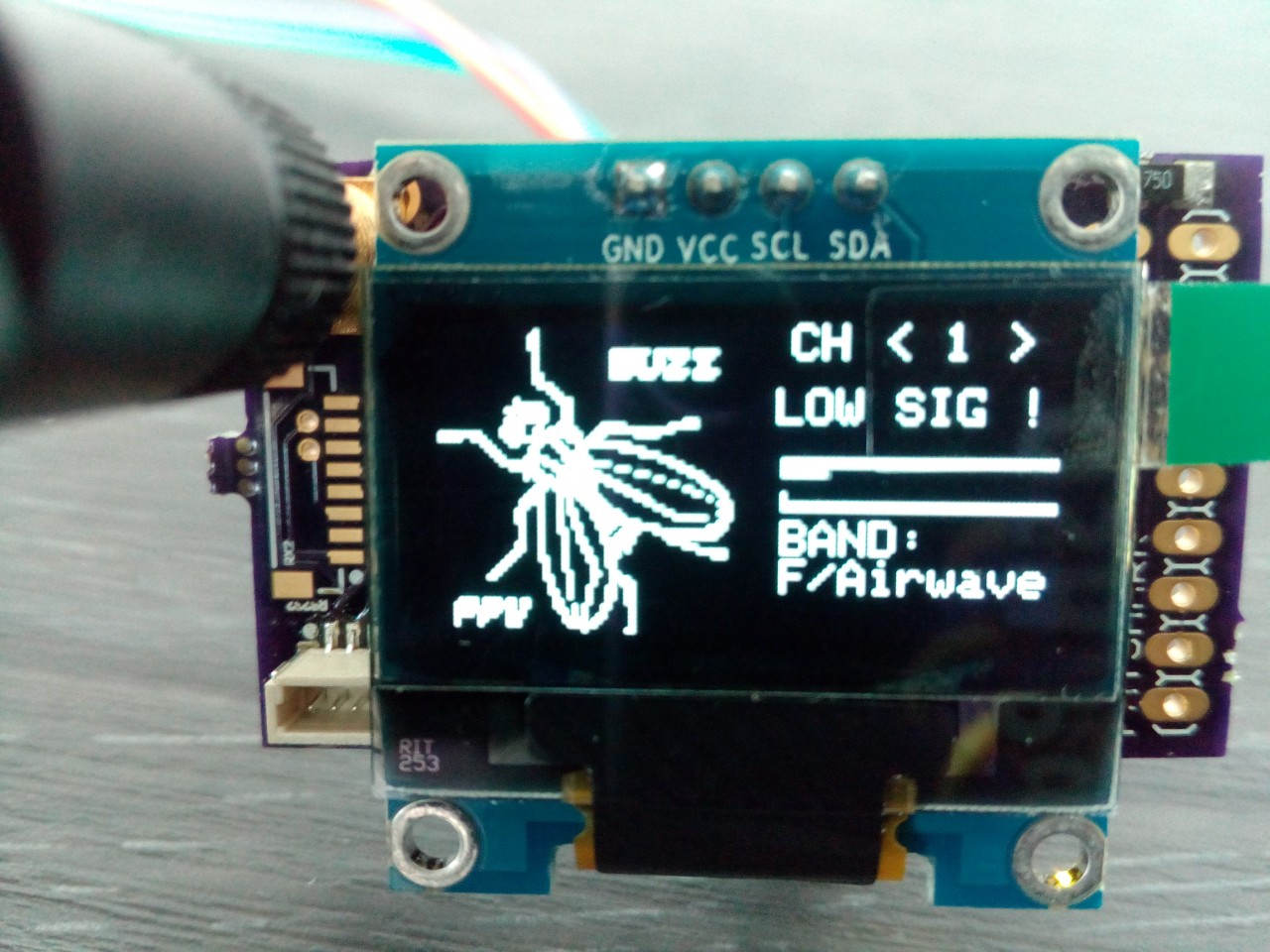
if (scr > 95 ) {
display.setCursor(10, 10);
display.setTextSize(2);
display.print(pgm_read_word_near(channel + channelFreqTable));
display.setCursor(10, 35);
display.print("MHZ");
display.setTextSize(1);
if (scr > 115)scr = 0;
}
display.setTextSize(1);
if (rssi2 < 20 || rssi3 < 20) {
display.setCursor(71, 13);
display.print("LOW SIG !");
delay (10);
}
else if (rssi2 > 35 && rssi3 > 35 ) {
display.setCursor(71, 13);
display.print("GOOD SIG ");
delay (10);
}
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(2, 0);
display.print(" CH < ");
display.print(memo);
display.print(" >");
delay (10);
display.fillRect(72, 27, 55, 2, WHITE);
display.fillRect(72, 29, rssi2, 2, WHITE);
display.fillRect(72, 34, rssi3, 2, WHITE);
display.fillRect(72, 36, 55, 2, WHITE);
display.display();
delay(10);
display.setCursor(72, 48);
if (channel > 39) {
memo = channel - 39;
display.print("D/5.3");
}
else if (channel > 31) {
memo = channel - 31;
display.print("C/Race");
}
else if (channel > 23) {
memo = channel - 23;
display.print("F/Airwave");
}
else if (channel > 15) {
memo = channel - 15;
display.print("E");
}
else if (channel > 7) {
memo = channel - 7;
display.print("B");
}
else if (channel < 7) {
display.print("A");
memo = channel + 1 ;
}
display.display();
}
#endif
//////////////////////////////////////////////////////////////////////////////////////////////////////
#ifdef Realac
/////////////////// MAIN SCREEN LOOP ///////////////////////////////////////////////////////////////
void manual() { // just manual main screen mode //
display.clearDisplay();
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState1 == HIGH ) but = 0;
if (buttonState0 == LOW ) {
channel = channel + 1;
if (channel >= 55)channel = 55;
display.clearDisplay();
display.setTextSize(4);
display.setCursor(0, 20);
display.print(" UP "); // disable
display.display();
delay (200);
display.setTextSize(1);
test();
scr = 95;
mnu = 1;
dp = 0;
delay (10);
}
if (buttonState2 == LOW ) {
channel = channel - 1;
if (channel <= 0)channel = 0;
display.clearDisplay();
display.setTextSize(4);
display.setCursor(0, 20);
display.print(" DOWN "); // disable
display.display();
delay (200);
display.setTextSize(1);
test();
scr = 95;
mnu = 2;
dp = 0;
delay (10);
}
if (buttonState1 == LOW ) { // middle presh menu test !!??!! dexters way of doing shit !
but = but + 1;
scp = 0;
dp = 0;
while (scp < 10) {
scp++;
display.drawCircle(63, display.height() / 2, scp * 2, WHITE);
display.display();
digitalWrite(ledPin, HIGH);
}
if (but > 5)but = 0;
if (but == 1) { // band up
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" BAND + "); // disable
display.display();
delay (600);
display.setTextSize(1);
display.clearDisplay();
delay (100);
buttonState1 = digitalRead(BUT2);
if (buttonState1 == LOW )return;
but = 0;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" OK "); // disable
display.display();
channel = channel + 8;
if (channel >= 47)channel = 47;
test();
scr = 80;
delay (320);
display.setTextSize(1);
display.clearDisplay();
delay (320);
return;
}
if (but == 2 ) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" BAND - "); // disable
display.display();
delay (600);
display.setTextSize(1);
display.clearDisplay();
buttonState1 = digitalRead(BUT2);
if (buttonState1 == LOW )return;
but = 0;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" OK "); // disable
display.display();
channel = channel - 8;
if (channel <= 0)channel = 0;
test();
scr = 80;
delay (320);
display.setTextSize(1);
display.clearDisplay();
delay (320);
sub1 = 0;
return;
}
if (but == 3) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" SFAVO "); // disable
display.display();
delay (600);
display.clearDisplay();
buttonState1 = digitalRead(BUT2);
if (buttonState1 == LOW )return;
but = 0;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" OK "); // disable
display.display();
delay (320);
display.setTextSize(1);
display.clearDisplay();
delay (320);
selector = 5;
}
if (but == 4) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" MENU "); // disable
display.display();
delay (600);
display.clearDisplay();
buttonState1 = digitalRead(BUT2);
if (buttonState1 == LOW )return;
but = 0;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" OK "); // disable
display.display();
delay (320);
display.setTextSize(1);
display.clearDisplay();
delay (320);
selector = 0;
}
display.setTextSize(1);
display.clearDisplay();
delay (320);
}
delay (20);
autocalib();
scr = scr + 1;
display.clearDisplay(); //////////////////////////////////////////////////////////////////////////////// SCREENSAVER PART //////
if (scr < 40) {
display.drawBitmap(1, 1, myBitmap2, 64, 64, 1);
/////////////////////////////////////////////////////////////////////////////////////
//display.drawCircle(33, 15, rssi3 / 4, WHITE); // Biohazard up //also used for RotorRiot
//display.drawCircle(33, 15, rssi2 / 4, WHITE); // Biohazard up
//display.drawCircle(17, 42, rssi2 / 4, WHITE); // Biohazrd left
//display.drawCircle(48, 42, rssi2 / 4, WHITE); // Biohazrd right
//display.drawCircle(33, 33, rssi3 / 2, WHITE); // Biohazard up
//display.drawCircle(33, 33, rssi2 / 2, WHITE); // Biohazard up
//display.drawCircle(33, 15, rssi3 / 6, WHITE); // Biohazard up
//display.drawCircle(33, 15, rssi2 / 6, WHITE); // Biohazard up
//display.drawCircle(17, 42, rssi2 / 6, WHITE); // Biohazrd left
//display.drawCircle(48, 42, rssi2 / 6, WHITE); // Biohazrd right
////////////////////////////////////////////////////////////////////////////////
display.drawCircle(52, 6, rssi3 / 4, WHITE); // TX Bubbles
display.drawCircle(52, 6, rssi2 / 4, WHITE); // TX Bubbles
////////////////////////////////////////////////////////////////////////////////////
// display.drawCircle(20, 5, rssi3 / 6, WHITE); // fish bubbles
// display.drawCircle(35, 2, rssi2 / 4, WHITE); // fish bubbles
// display.drawCircle(10, 9, rssi3 / 6, WHITE); // fish bubbles
// display.drawCircle(5, 12, rssi2 / 4, WHITE); // fish bubbles
}
if (scr > 40 && scr < 95 ) {
display.setCursor(10, 5);
display.setTextSize(8);
display.print(memo);
display.setTextSize(1);
}
if (scr > 95 ) {
display.setCursor(10, 10);
display.setTextSize(2);
if (channel == 48)display.print(pgm_read_word_near(fav1 + channelFreqTable));
if (channel == 49)display.print(pgm_read_word_near(fav2 + channelFreqTable));
if (channel == 50)display.print(pgm_read_word_near(fav3 + channelFreqTable));
if (channel == 51)display.print(pgm_read_word_near(fav4 + channelFreqTable));
if (channel == 52)display.print(pgm_read_word_near(fav5 + channelFreqTable));
if (channel == 53)display.print(pgm_read_word_near(fav6 + channelFreqTable));
if (channel == 54)display.print(pgm_read_word_near(fav7 + channelFreqTable));
if (channel == 55)display.print(pgm_read_word_near(fav8 + channelFreqTable));
if (channel <= 47)display.print(pgm_read_word_near(channel + channelFreqTable));
display.setCursor(10, 35);
display.print("MHZ");
display.setTextSize(1);
if (scr > 115)scr = 0;
}
if (rssi2 < 20 || rssi3 < 20) {
display.setCursor(71, 13);
display.print("LOW SIG !");
delay (10);
}
else if (rssi2 > 35 && rssi3 > 35 ) {
display.setCursor(71, 13);
display.print("GOOD SIG ");
delay (10);
}
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(2, 0);
display.print(" CH < ");
display.print(memo);
display.print(" >");
delay (10);
display.fillRect(72, 27, 55, 2, WHITE);
display.fillRect(72, 29, rssi2, 2, WHITE);
display.fillRect(72, 34, rssi3, 2, WHITE);
display.fillRect(72, 36, 55, 2, WHITE);
display.fillRect(72, 29, HIS1, 3, BLACK); // new
display.fillRect(72, 34, HIS2, 3, BLACK); // new
display.setCursor(72, 48);
if (channel > 47) {
memo = channel - 47;
display.print("!FAV!");
}
else if (channel > 39) {
memo = channel - 39;
display.print("D/5.3");
}
else if (channel > 31) {
memo = channel - 31;
display.print("C/Race");
}
else if (channel > 23) {
memo = channel - 23;
display.print("F/Airwave");
}
else if (channel > 15) {
memo = channel - 15;
display.print("E");
}
else if (channel > 7) {
memo = channel - 7;
display.print("B");
}
else display.print("A");
display.display();
delay(10);
if (channel > 55)channel = 0;
if (channel < 1 )channel = 55;
}
#endif
#ifdef Furious
/////////////////// MAIN SCREEN LOOP ///////////////////////////////////////////////////////////////
void manual() { // just manual main screen mode //
display.clearDisplay();
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState1 == HIGH ) but = 0;
if (buttonState0 == LOW ) {
channel = channel + 1;
if (channel >= 55)channel = 55;
display.clearDisplay();
display.setTextSize(4);
display.setCursor(0, 20);
display.print(" UP "); // disable
display.display();
delay (200);
display.setTextSize(1);
test();
scr = 95;
mnu = 1;
dp = 0;
delay (10);
}
if (buttonState2 == LOW ) {
channel = channel - 1;
if (channel <= 0)channel = 0;
display.clearDisplay();
display.setTextSize(4);
display.setCursor(0, 20);
display.print(" DOWN "); // disable
display.display();
delay (200);
display.setTextSize(1);
test();
scr = 95;
mnu = 2;
dp = 0;
delay (10);
}
if (buttonState1 == LOW ) { // middle presh menu test !!??!! dexters way of doing shit !
but = but + 1;
scp = 0;
dp = 0;
while (scp < 10) {
scp++;
display.drawCircle(63, display.height() / 2, scp * 2, WHITE);
display.display();
digitalWrite(ledPin, HIGH);
}
if (but > 5)but = 0;
if (but == 1) { // band up
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" BAND + "); // disable
display.display();
delay (600);
display.setTextSize(1);
display.clearDisplay();
delay (100);
buttonState1 = digitalRead(BUT2);
if (buttonState1 == LOW )return;
but = 0;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" OK "); // disable
display.display();
channel = channel + 8;
if (channel >= 47)channel = 47;
test();
scr = 80;
delay (320);
display.setTextSize(1);
display.clearDisplay();
delay (320);
return;
}
if (but == 2 ) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" BAND - "); // disable
display.display();
delay (600);
display.setTextSize(1);
display.clearDisplay();
buttonState1 = digitalRead(BUT2);
if (buttonState1 == LOW )return;
but = 0;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" OK "); // disable
display.display();
channel = channel - 8;
if (channel <= 0)channel = 0;
test();
scr = 80;
delay (320);
display.setTextSize(1);
display.clearDisplay();
delay (320);
sub1 = 0;
return;
}
if (but == 3) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" SFAVO "); // disable
display.display();
delay (600);
display.clearDisplay();
buttonState1 = digitalRead(BUT2);
if (buttonState1 == LOW )return;
but = 0;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" OK "); // disable
display.display();
delay (320);
display.setTextSize(1);
display.clearDisplay();
delay (320);
selector = 5;
}
if (but == 4) {
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" MENU "); // disable
display.display();
delay (600);
display.clearDisplay();
buttonState1 = digitalRead(BUT2);
if (buttonState1 == LOW )return;
but = 0;
display.clearDisplay();
display.setTextSize(2);
display.setCursor(0, 20);
display.print(" OK "); // disable
display.display();
delay (320);
display.setTextSize(1);
display.clearDisplay();
delay (320);
selector = 0;
}
display.setTextSize(1);
display.clearDisplay();
delay (320);
}
delay (20);
autocalib();
scr = scr + 1;
display.clearDisplay(); //////////////////////////////////////////////////////////////////////////////// SCREENSAVER PART //////
if (scr < 40) {
display.drawBitmap(1, 1, myBitmap2, 64, 64, 1);
/////////////////////////////////////////////////////////////////////////////////////
//display.drawCircle(33, 15, rssi3 / 4, WHITE); // Biohazard up //also used for RotorRiot
//display.drawCircle(33, 15, rssi2 / 4, WHITE); // Biohazard up
//display.drawCircle(17, 42, rssi2 / 4, WHITE); // Biohazrd left
//display.drawCircle(48, 42, rssi2 / 4, WHITE); // Biohazrd right
//display.drawCircle(33, 33, rssi3 / 2, WHITE); // Biohazard up
//display.drawCircle(33, 33, rssi2 / 2, WHITE); // Biohazard up
//display.drawCircle(33, 15, rssi3 / 6, WHITE); // Biohazard up
//display.drawCircle(33, 15, rssi2 / 6, WHITE); // Biohazard up
//display.drawCircle(17, 42, rssi2 / 6, WHITE); // Biohazrd left
//display.drawCircle(48, 42, rssi2 / 6, WHITE); // Biohazrd right
////////////////////////////////////////////////////////////////////////////////
display.drawCircle(52, 6, rssi3 / 4, WHITE); // TX Bubbles
display.drawCircle(52, 6, rssi2 / 4, WHITE); // TX Bubbles
////////////////////////////////////////////////////////////////////////////////////
// display.drawCircle(20, 5, rssi3 / 6, WHITE); // fish bubbles
// display.drawCircle(35, 2, rssi2 / 4, WHITE); // fish bubbles
// display.drawCircle(10, 9, rssi3 / 6, WHITE); // fish bubbles
// display.drawCircle(5, 12, rssi2 / 4, WHITE); // fish bubbles
}
if (scr > 40 && scr < 95 ) {
display.setCursor(10, 5);
display.setTextSize(8);
display.print(memo);
display.setTextSize(1);
}
if (scr > 95 ) {
display.setCursor(10, 10);
display.setTextSize(2);
if (channel == 48)display.print(pgm_read_word_near(fav1 + channelFreqTable));
if (channel == 49)display.print(pgm_read_word_near(fav2 + channelFreqTable));
if (channel == 50)display.print(pgm_read_word_near(fav3 + channelFreqTable));
if (channel == 51)display.print(pgm_read_word_near(fav4 + channelFreqTable));
if (channel == 52)display.print(pgm_read_word_near(fav5 + channelFreqTable));
if (channel == 53)display.print(pgm_read_word_near(fav6 + channelFreqTable));
if (channel == 54)display.print(pgm_read_word_near(fav7 + channelFreqTable));
if (channel == 55)display.print(pgm_read_word_near(fav8 + channelFreqTable));
if (channel <= 47)display.print(pgm_read_word_near(channel + channelFreqTable));
display.setCursor(10, 35);
display.print("MHZ");
display.setTextSize(1);
if (scr > 115)scr = 0;
}
if (rssi2 < 20 || rssi3 < 20) {
display.setCursor(71, 13);
display.print("LOW SIG !");
delay (10);
}
else if (rssi2 > 35 && rssi3 > 35 ) {
display.setCursor(71, 13);
display.print("GOOD SIG ");
delay (10);
}
display.setTextColor(WHITE);
display.setTextSize(1);
display.setCursor(2, 0);
display.print(" CH < ");
display.print(memo);
display.print(" >");
delay (10);
display.fillRect(72, 27, 55, 2, WHITE);
display.fillRect(72, 29, rssi2, 2, WHITE);
display.fillRect(72, 34, rssi3, 2, WHITE);
display.fillRect(72, 36, 55, 2, WHITE);
display.fillRect(72, 29, HIS1, 3, BLACK); // new
display.fillRect(72, 34, HIS2, 3, BLACK); // new
display.setCursor(72, 48);
if (channel > 47) {
memo = channel - 47;
display.print("!FAV!");
}
else if (channel > 39) {
memo = channel - 39;
display.print("D/5.3");
}
else if (channel > 31) {
memo = channel - 31;
display.print("C/Race");
}
else if (channel > 23) {
memo = channel - 23;
display.print("F/Airwave");
}
else if (channel > 15) {
memo = channel - 15;
display.print("E");
}
else if (channel > 7) {
memo = channel - 7;
display.print("B");
}
else display.print("A");
display.display();
delay(10);
if (channel > 55)channel = 0;
if (channel < 1 )channel = 55;
}
#endif
#ifdef Realac
void filter() { // menu to set filter treshold //
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState0 == LOW) {
HISFILT = HISFILT - 1;
delay (100);;
}
if (buttonState1 == LOW) {
selector = 0;
delay (100);
}
if (buttonState2 == LOW) {
HISFILT = HISFILT + 1;
delay (100);
}
if (HISFILT > 25)HISFILT = 5;
if (HISFILT < 5)HISFILT = 5;
EEPROM.write(2, HISFILT);
display.clearDisplay();
display.setTextSize(1);
display.setCursor(2, 0);
display.print(" << SET FILTER >>");
display.setCursor(61, 20);
display.print(HISFILT);
display.setCursor(32, 40);
if (HISFILT <= 10)display.print("FILTER LOW");
if (HISFILT > 10 && HISFILT < 15)display.print("FILTER MEDIUM");
if (HISFILT >= 15)display.print("FILTER HIGH");
display.display();
digitalWrite(ledPin, LOW);
}
#endif
#ifdef Furious
void filter() { // menu to set filter treshold //
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState0 == LOW) {
HISFILT = HISFILT - 1;
delay (100);;
}
if (buttonState1 == LOW) {
selector = 0;
delay (100);
}
if (buttonState2 == LOW) {
HISFILT = HISFILT + 1;
delay (100);
}
if (HISFILT > 25)HISFILT = 5;
if (HISFILT < 5)HISFILT = 5;
EEPROM.write(2, HISFILT);
display.clearDisplay();
display.setTextSize(1);
display.setCursor(2, 0);
display.print(" << SET FILTER >>");
display.setCursor(61, 20);
display.print(HISFILT);
display.setCursor(32, 40);
if (HISFILT <= 10)display.print("FILTER LOW");
if (HISFILT > 10 && HISFILT < 15)display.print("FILTER MEDIUM");
if (HISFILT >= 15)display.print("FILTER HIGH");
display.display();
digitalWrite(ledPin, LOW);
}
#endif
#ifdef Realac
void favor() { // menu to set filter treshold //
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState0 == LOW) {
favselect = favselect - 1;
delay (100);
}
if (buttonState1 == LOW) {
selector = 4;
/////////////////////////////////////////////////////
if (favselect == 1)fav1 = channel;
if (favselect == 2)fav2 = channel;
if (favselect == 3)fav3 = channel;
if (favselect == 4)fav4 = channel;
if (favselect == 5)fav5 = channel;
if (favselect == 6)fav6 = channel;
if (favselect == 7)fav7 = channel;
if (favselect == 8)fav8 = channel;
///////////////////////////////////////////////// new Favorite part !
delay (100);
favorsave();
}
if (buttonState2 == LOW) {
favselect = favselect + 1;
delay (100);
}
if (favselect > 8)favselect = 1;
if (favselect < 1)favselect = 8;
display.clearDisplay();
display.setTextSize(1);
display.setCursor(2, 0);
display.print(" << SET FAVO CH >>");
display.setCursor(61, 20);
display.print(favselect);
display.display();
digitalWrite(ledPin, LOW);
}
#endif
#ifdef Furious
void favor() { // menu to set filter treshold //
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
if (buttonState0 == LOW) {
favselect = favselect - 1;
delay (100);
}
if (buttonState1 == LOW) {
selector = 4;
/////////////////////////////////////////////////////
if (favselect == 1)fav1 = channel;
if (favselect == 2)fav2 = channel;
if (favselect == 3)fav3 = channel;
if (favselect == 4)fav4 = channel;
if (favselect == 5)fav5 = channel;
if (favselect == 6)fav6 = channel;
if (favselect == 7)fav7 = channel;
if (favselect == 8)fav8 = channel;
///////////////////////////////////////////////// new Favorite part !
delay (100);
favorsave();
}
if (buttonState2 == LOW) {
favselect = favselect + 1;
delay (100);
}
if (favselect > 8)favselect = 1;
if (favselect < 1)favselect = 8;
display.clearDisplay();
display.setTextSize(1);
display.setCursor(2, 0);
display.print(" << SET FAVO CH >>");
display.setCursor(61, 20);
display.print(favselect);
display.display();
digitalWrite(ledPin, LOW);
}
#endif
/////////////////////////////////////////
#ifdef Realac
void favorsave() {
EEPROM.write(3, fav1);
EEPROM.write(4, fav2);
EEPROM.write(5, fav3);
EEPROM.write(6, fav4);
EEPROM.write(7, fav5);
EEPROM.write(8, fav6);
EEPROM.write(9, fav7);
EEPROM.write(10, fav8);
}
#endif
#ifdef Furious
void favorsave() {
EEPROM.write(3, fav1);
EEPROM.write(4, fav2);
EEPROM.write(5, fav3);
EEPROM.write(6, fav4);
EEPROM.write(7, fav5);
EEPROM.write(8, fav6);
EEPROM.write(9, fav7);
EEPROM.write(10, fav8);
}
#endif
/////////////////////////////////////////////
#ifdef Realac
void favorread() {
fav1 = EEPROM.read(3);
fav2 = EEPROM.read(4);
fav3 = EEPROM.read(5);
fav4 = EEPROM.read(6);
fav5 = EEPROM.read(7);
fav6 = EEPROM.read(8);
fav7 = EEPROM.read(9);
fav8 = EEPROM.read(10);
if (fav1 < 0 || fav1 > 55)fav1 = 24;
if (fav2 < 0 || fav2 > 55)fav2 = 31;
if (fav3 < 0 || fav3 > 55)fav3 = 24;
if (fav4 < 0 || fav4 > 55)fav4 = 31;
if (fav5 < 0 || fav5 > 55)fav5 = 24;
if (fav6 < 0 || fav6 > 55)fav6 = 31;
if (fav7 < 0 || fav7 > 55)fav7 = 24;
if (fav8 < 0 || fav8 > 55)fav8 = 31;
}
#endif
#ifdef Furious
void favorread() {
fav1 = EEPROM.read(3);
fav2 = EEPROM.read(4);
fav3 = EEPROM.read(5);
fav4 = EEPROM.read(6);
fav5 = EEPROM.read(7);
fav6 = EEPROM.read(8);
fav7 = EEPROM.read(9);
fav8 = EEPROM.read(10);
if (fav1 < 0 || fav1 > 55)fav1 = 24;
if (fav2 < 0 || fav2 > 55)fav2 = 31;
if (fav3 < 0 || fav3 > 55)fav3 = 24;
if (fav4 < 0 || fav4 > 55)fav4 = 31;
if (fav5 < 0 || fav5 > 55)fav5 = 24;
if (fav6 < 0 || fav6 > 55)fav6 = 31;
if (fav7 < 0 || fav7 > 55)fav7 = 24;
if (fav8 < 0 || fav8 > 55)fav8 = 31;
}
#endif
////////////////////////////////////////////////////////////////////////////////////////////////
#ifdef Furious
void scope() {
display.clearDisplay();
scp = 0;
while (scp < 111) {
scp++;
display.drawBitmap(30, 0, flagy, 64, 64, 1);
autocalib();
display.fillRect(0, 62, 124, 2, WHITE);
display.fillRect(1, 0, 1, 63, WHITE);
display.fillRect(2, rssi2, 10, 10 , WHITE);
display.fillRect(12, 0, 1, 63, WHITE);
display.fillRect(112, 0, 1, 63, WHITE);
display.fillRect(113, rssi3, 10, 10 , WHITE);
display.fillRect(123, 0, 1, 63, WHITE);
if (scp > 11 ) {
display.fillRect(scp, rssi2, 1, 1 , WHITE);
display.fillRect(scp, rssi3, 3, 1 , WHITE);
}
else if (scp > 112 ) {
display.clearDisplay();
scp = 0;
return;
}
display.display();
selector = 4;
delay(5);
}
}
#endif
#ifdef Realac
void scope() {
display.clearDisplay();
scp = 0;
while (scp < 111) {
scp++;
display.drawBitmap(30, 0, flagy, 64, 64, 1);
autocalib();
display.fillRect(0, 62, 124, 2, WHITE);
display.fillRect(1, 0, 1, 63, WHITE);
display.fillRect(2, rssi2, 10, 10 , WHITE);
display.fillRect(12, 0, 1, 63, WHITE);
display.fillRect(112, 0, 1, 63, WHITE);
display.fillRect(113, rssi3, 10, 10 , WHITE);
display.fillRect(123, 0, 1, 63, WHITE);
if (scp > 11 ) {
display.fillRect(scp, rssi2, 1, 1 , WHITE);
display.fillRect(scp, rssi3, 3, 1 , WHITE);
}
else if (scp > 112 ) {
display.clearDisplay();
scp = 0;
return;
}
display.display();
selector = 4;
delay(5);
}
}
#endif
#ifdef Realac
void search() {
while (goat < 1) {
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
autocalib();
if (buttonState0 == LOW && buttonState2 == LOW) {
display.clearDisplay();
display.setCursor(34, 32);
display.print("BACK MENU");
display.display();
selector = 4;
goat = 0;
return;
delay (500);
}
if (rssi2 > 50 || rssi3 > 50)goat = 1;
delay(20);
display.setCursor(45, 53);
display.print(rssi2);
display.drawCircle(25, display.height() / 2, rssi2, WHITE);
display.drawCircle(25, display.height() / 2, rssi2 / 2, WHITE);
display.drawCircle(25, display.height() / 2, rssi2 / 5, WHITE);
display.display();
delay(15);
display.clearDisplay();
display.setCursor(45, 53);
display.print(rssi2);
display.drawCircle(102, display.height() / 2, rssi3, WHITE);
display.drawCircle(102, display.height() / 2, rssi3 / 2, WHITE);
display.drawCircle(102, display.height() / 2, rssi3 / 5, WHITE);
display.display();
delay(15);
display.clearDisplay();
display.setCursor(45, 53);
// display.print("FINDER");
display.print(rssi2);
display.fillRect(23, rssi2 - rssi3, 5, 6, WHITE);
display.fillRect(100, rssi3 - rssi2, 5, 6, WHITE);
display.display();
delay(15);
}
goat = 0;
}
#endif
#ifdef Furious
void search() {
while (goat < 1) {
buttonState0 = digitalRead(BUT1);
buttonState1 = digitalRead(BUT2);
buttonState2 = digitalRead(BUT3);
autocalib();
if (buttonState0 == LOW && buttonState2 == LOW) {
display.clearDisplay();
display.setCursor(34, 32);
display.print("BACK MENU");
display.display();
selector = 4;
goat = 0;
return;
delay (500);
}
if (rssi2 > 50 || rssi3 > 50)goat = 1;
delay(20);
display.setCursor(45, 53);
display.print(rssi2);
display.drawCircle(25, display.height() / 2, rssi2, WHITE);
display.drawCircle(25, display.height() / 2, rssi2 / 2, WHITE);
display.drawCircle(25, display.height() / 2, rssi2 / 5, WHITE);
display.display();
delay(15);
display.clearDisplay();
display.setCursor(45, 53);
display.print(rssi2);
display.drawCircle(102, display.height() / 2, rssi3, WHITE);
display.drawCircle(102, display.height() / 2, rssi3 / 2, WHITE);
display.drawCircle(102, display.height() / 2, rssi3 / 5, WHITE);
display.display();
delay(15);
display.clearDisplay();
display.setCursor(45, 53);
// display.print("FINDER");
display.print(rssi2);
display.fillRect(23, rssi2 - rssi3, 5, 6, WHITE);
display.fillRect(100, rssi3 - rssi2, 5, 6, WHITE);
display.display();
delay(15);
}
goat = 0;
}
#endif
#ifdef Buzz
void strong() {
best = 0;
delay(50);
if (channel >= 40 && channel <= 47) {
for (uint8_t i = 40; i <= 47; i++) {
channel = i;
delay (10);
test();
delay(100);
rssi = (analogRead(A0));
delay (50);
if (rssi - 10 > best + 20 ) {
best = rssi - 5 ;
digitalWrite(ledPin, HIGH);
delay (50);
memo = channel;
}
uint8_t ext = map(channel, 0, 48, 0, 128);
rssi = map(rssi, 100, 300, 63, 40);
display.clearDisplay();
display.setTextSize(1);
display.setCursor(23, 20);
display.print(">> SCANNING <<");
display.setCursor(64, 40);
display.print(channel - 39);
display.fillRect(ext, rssi, 2, 14, WHITE);
display.display();
delay (100);
digitalWrite(ledPin, LOW);
}
delay (50);
channel = memo - 1;
test();
display.clearDisplay();
display.setCursor(23, 20);
display.print(">> STRONGEST <<");
display.setTextSize(2);
display.setCursor(20, 40);
display.print(channel - 39);
display.setTextSize(1);
display.setCursor(72, 48);
delay (50);
memo = channel - 39;
display.print("D/5.3");
display.display();
delay (1300);
best = 0;
return;
}
else if (channel >= 32 && channel <= 39 ) {
for (uint8_t i = 32; i <= 39; i++) {
channel = i;
delay (10);
test();
delay(100);
rssi = (analogRead(A0));
delay (50);
if (rssi - 10 > best + 20 ) {
best = rssi - 5 ;
digitalWrite(ledPin, HIGH);
delay (50);
memo = channel;
}
uint8_t ext = map(channel, 0, 48, 0, 128);
rssi = map(rssi, 100, 300, 63, 40);
display.clearDisplay();
display.setTextSize(1);
display.setCursor(23, 20);
display.print(">> SCANNING <<");
display.setCursor(64, 40);
display.print(channel - 31);
display.fillRect(ext, rssi, 2, 14, WHITE);
display.display();
delay (100);
digitalWrite(ledPin, LOW);
}
delay (50);
channel = memo - 1 ;
test();
display.clearDisplay();
display.setCursor(23, 20);
display.print(">> STRONGEST <<");
display.setTextSize(2);
display.setCursor(20, 40);
display.print(channel - 31);
display.setTextSize(1);
display.setCursor(72, 48);
delay (50);
memo = channel - 31;
display.print("C/Race");
display.display();
delay (1300);
best = 0;
return;
}
else if (channel >= 24 && channel <= 31) {
best = 0;
for (uint8_t i = 24; i <= 31; i++) {
channel = i;
delay (10);
test();
delay(100);
rssi = (analogRead(A0));
delay (50);
if (rssi - 10 > best + 20 ) {
best = rssi - 5 ;
digitalWrite(ledPin, HIGH);
delay (50);
memo = channel;
}
uint8_t ext = map(channel, 0, 48, 0, 128);
rssi = map(rssi, 100, 300, 63, 40);
display.clearDisplay();
display.setTextSize(1);
display.setCursor(23, 20);
display.print(">> SCANNING <<");
display.setCursor(64, 40);
display.print(channel - 23 );
display.fillRect(ext, rssi, 2, 14, WHITE);
display.display();
delay (100);
digitalWrite(ledPin, LOW);
}
delay (50);
channel = memo - 1 ;
test();
display.clearDisplay();
display.setCursor(23, 20);
display.print(">> STRONGEST <<");
display.setTextSize(2);
display.setCursor(20, 40);
display.print(channel - 23);
display.setTextSize(1);
display.setCursor(72, 48);
delay (50);
memo = channel - 23;
display.print("F/Airwave");
display.display();
delay (1300);
best = 0;
return;
}
else if (channel >= 16 && channel <= 23) {
for (uint8_t i = 16; i <= 23; i++) {
channel = i;
delay (10);
test();
delay(100);
rssi = (analogRead(A0));
delay (50);
if (rssi - 10 > best + 20 ) {
best = rssi - 5 ;
digitalWrite(ledPin, HIGH);
delay (50);
memo = channel;
}
uint8_t ext = map(channel, 0, 48, 0, 128);
rssi = map(rssi, 100, 300, 63, 40);
display.clearDisplay();
display.setTextSize(1);
display.setCursor(23, 20);
display.print(">> SCANNING <<");
display.setCursor(64, 40);
display.print(channel - 15);
display.fillRect(ext, rssi, 2, 14, WHITE);
display.display();
delay (100);
digitalWrite(ledPin, LOW);
}
delay (50);
channel = memo - 1 ;
test();
display.clearDisplay();
display.setCursor(23, 20);
display.print(">> STRONGEST <<");
display.setTextSize(2);
display.setCursor(20, 40);
display.print(channel - 15);
display.setTextSize(1);
display.setCursor(72, 48);
delay (50);
memo = channel - 15;
display.print("E");
display.display();
delay (1300);
best = 0;
return;
}
else if (channel >= 8 && channel <= 15) {
for (uint8_t i = 8; i <= 15; i++) {
channel = i;
delay (10);
test();
delay(100);
rssi = (analogRead(A0));
delay (50);
if (rssi - 10 > best + 20 ) {
best = rssi - 5 ;
digitalWrite(ledPin, HIGH);
delay (50);
memo = channel;
}
uint8_t ext = map(channel, 0, 48, 0, 128);
rssi = map(rssi, 100, 300, 63, 40);
display.clearDisplay();
display.setTextSize(1);
display.setCursor(23, 20);
display.print(">> SCANNING <<");
display.setCursor(64, 40);
display.print(channel - 7);
display.fillRect(ext, rssi, 2, 14, WHITE);
display.display();
delay (100);
digitalWrite(ledPin, LOW);
}
delay (50);
channel = memo - 1;
test();
display.clearDisplay();
display.setCursor(23, 20);
display.print(">> STRONGEST <<");
display.setTextSize(2);
display.setCursor(20, 40);
display.print(channel - 7);
display.setTextSize(1);
display.setCursor(72, 48);
delay (50);
memo = channel - 7;
display.print("B");
display.display();
delay (1300);
best = 0;
return;
}
else if (channel <= 7 ) {
for (uint8_t i = 0; i <= 7; i++) {
channel = i;
delay (10);
test();
delay(100);
rssi = (analogRead(A0));
delay (50);
if (rssi - 10 > best + 20 ) {
best = rssi - 5 ;
digitalWrite(ledPin, HIGH);
delay (50);
memo = channel;
}
uint8_t ext = map(channel, 0, 48, 0, 128);
rssi = map(rssi, 100, 300, 63, 40);
display.clearDisplay();
display.setTextSize(1);
display.setCursor(23, 20);
display.print(">> SCANNING <<");
display.setCursor(64, 40);
display.print(channel );
display.fillRect(ext, rssi, 2, 14, WHITE);
display.display();
delay (100);
digitalWrite(ledPin, LOW);
}
delay (50);
channel = memo - 1;
test();
display.clearDisplay();
display.setCursor(23, 20);
display.print(">> STRONGEST <<");
display.setTextSize(2);
display.setCursor(20, 40);
display.print(channel);
display.setTextSize(1);
display.setCursor(72, 48);
delay (50);
display.print("A");
display.setCursor(72, 40);
display.display();
delay (1300);
best = 0;
return;
}
}
#endif
//////////////////////////////////////////////////////////////////
#ifdef Buzz
void search() {
while (goat < 1) {
autocalib();
if (rssi2 > 50 || rssi3 > 50)goat = 1;
delay(20);
display.setCursor(45, 53);
display.print(rssi2);
display.drawCircle(25, display.height() / 2, rssi2, WHITE);
display.drawCircle(25, display.height() / 2, rssi2 / 2, WHITE);
display.drawCircle(25, display.height() / 2, rssi2 / 5, WHITE);
display.display();
delay(15);
display.clearDisplay();
display.setCursor(45, 53);
display.print(rssi2);
display.drawCircle(102, display.height() / 2, rssi3, WHITE);
display.drawCircle(102, display.height() / 2, rssi3 / 2, WHITE);
display.drawCircle(102, display.height() / 2, rssi3 / 5, WHITE);
display.display();
delay(15);
display.clearDisplay();
display.setCursor(45, 53);
// display.print("FINDER");
display.print(rssi2);
display.fillRect(23, rssi2 - rssi3, 5, 6, WHITE);
display.fillRect(100, rssi3 - rssi2, 5, 6, WHITE);
display.display();
delay(15);
}
goat = 0;
}
#endif
/////////////////////////////////////////////////////////////////////////////////////////////////
#ifdef Buzz
void scope() {
scp = 0;
while (scp < 111) {
scp++;
autocalib();
display.fillRect(0, 62, 124, 2, WHITE);
display.fillRect(1, 0, 1, 63, WHITE);
display.fillRect(2, rssi2, 10, 10 , WHITE);
display.fillRect(12, 0, 1, 63, WHITE);
display.fillRect(112, 0, 1, 63, WHITE);
display.fillRect(113, rssi3, 10, 10 , WHITE);
display.fillRect(123, 0, 1, 63, WHITE);
if (scp > 11 ) {
display.fillRect(scp, rssi2, 1, 1 , WHITE);
display.fillRect(scp, rssi3, 3, 1 , WHITE);
}
else if (scp > 112 ) {
display.clearDisplay();
scp = 0;
return;
}
display.display();
delay(5);
}
}
#endif
//////////////////////////////////////////////////////////////////////////
#ifdef osd
void osd() { // new section to send data 2 osd ,,
#ifdef Furious
rssiosd1 = map(analogRead(A6), rssi1_MIN, rssi1_MAX, 100, 0);
delay (30);
rssiosd2 = map(analogRead(A7), rssi2_MIN, rssi2_MAX, 100, 0);
#endif
#ifdef Realac
rssiosd1 = map(analogRead(A6), rssi1_MIN, rssi1_MAX, 100, 0);
delay (30);
rssiosd2 = map(analogRead(A7), rssi2_MIN, rssi2_MAX, 100, 0);
#endif
delay (30);
Serial.print(channel);
Serial.print(",");
delay (3);
Serial.print(rssiosd1);
Serial.print(",");
delay (3);
Serial.print(rssiosd2);
Serial.print(",");
delay (3);
Serial.print(swt);
Serial.print(",");
delay (3);
Serial.println(mnu);/// new for showing menu stuff ,,///
mnu = 0;
return;
}
#endif
void turbo() { // making the switching routine faster by dropping al other routines ,, !!
turboswitch() ;
display.clearDisplay();
display.drawBitmap(30, 0, hand, 64, 64, 1);
return;
}